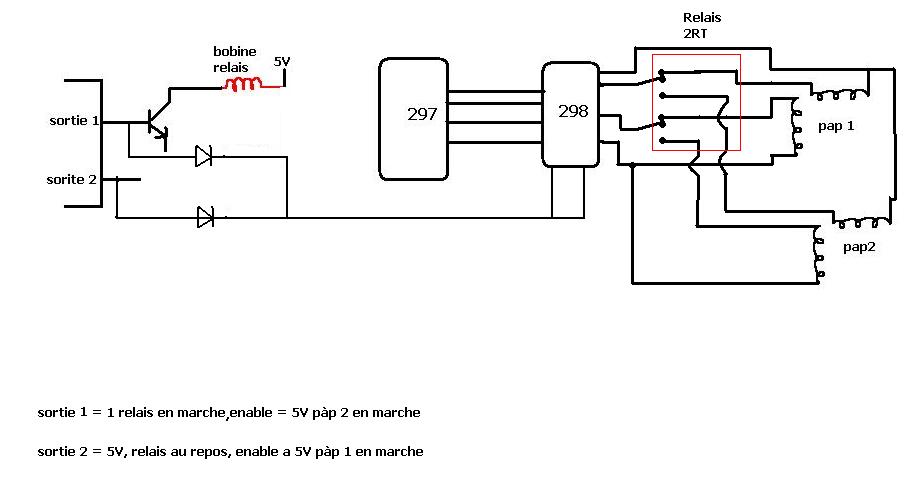
Comment Faire Fonctionner 2 Moteurs Pap En Meme Temps

Okay, so picture this: me, surrounded by wires, blinking LEDs, and the faint smell of burnt plastic. I was trying to build a ridiculously complex robotic arm – ambitious, I know. The problem? I needed two stepper motors to move in perfect sync, like some kind of intricate dance. And let me tell you, getting them to cooperate was… well, let’s just say my vocabulary expanded considerably that day. You know, the kind of vocabulary best used when alone.
But that's the thing about projects like these, isn't it? The initial frustration eventually gives way to a "Eureka!" moment (or several, spaced agonizingly far apart). And that's what I want to share with you today: how to actually get two stepper motors working together, without pulling your hair out. Prepare yourself!
The Basics: Why Two Steppers Are Like Two Divas
Stepper motors, those wonderful little contraptions that move in precise steps, can be a bit… demanding. Imagine them as two divas on the same stage. They both need the same directions, but getting them to actually listen and move at the same tempo? That's the challenge. Think of it like conducting an orchestra, only the instruments are a bit temperamental.
Must Read
So, what makes two stepper motors running together such a head-scratcher? It’s all about precise timing and synchronization. You need to send the right signals to each motor at exactly the right moment, otherwise, you'll get jerky, uneven movement, or worse – they'll just refuse to budge. Like trying to make a perfectly timed souffle, one wrong move and the whole thing collapses.
The Hardware: What You'll Need to Get Started
Before we dive into the code, let's make sure you have the right tools for the job. This is assuming you already know how to drive one stepper motor. If not, go check out the basics first! I'll wait. Seriously.

- Two stepper motors: Obviously. Make sure they're compatible with your driver and power supply.
- Stepper motor drivers: You'll need drivers capable of handling the current and voltage requirements of your motors. Look into A4988 or DRV8825 – they’re pretty common and relatively easy to use.
- Microcontroller: Arduino, ESP32, or any microcontroller with enough pins to control both drivers. I'm a big fan of ESP32s because they're cheap and come with built-in Wi-Fi, perfect for… reasons.
- Power supply: Make sure it can provide enough juice for both motors at the same time. Don't skimp on the power supply, or your motors will be sad and weak.
- Wires, breadboard, and other miscellaneous electronic bits: Because wires are the duct tape of electronics.
The Software: Making the Motors Dance Together
Now for the fun part: the code! There are several ways to approach this. One popular method is using a timer interrupt to generate pulses for both motors. This allows for very precise timing. Think of it as setting a metronome to keep them in sync.
Another option is to use a library like AccelStepper (for Arduino). AccelStepper can handle acceleration and deceleration profiles, which is essential for smooth movement. It's like teaching them to waltz instead of robotically stomping around.
Here's a simplified example using the AccelStepper library:
#include <AccelStepper.h>
// Define motor connections
#define motorPin1 8 // IN1 on the ULN2003 driver 1
#define motorPin2 9 // IN2 on the ULN2003 driver 1
#define motorPin3 10 // IN3 on the ULN2003 driver 1
#define motorPin4 11 // IN4 on the ULN2003 driver 1
#define motorPin5 4 // IN1 on the ULN2003 driver 2
#define motorPin6 5 // IN2 on the ULN2003 driver 2
#define motorPin7 6 // IN3 on the ULN2003 driver 2
#define motorPin8 7 // IN4 on the ULN2003 driver 2
// Define stepper motors
AccelStepper stepper1(AccelStepper::FULL4WIRE, motorPin1, motorPin3, motorPin2, motorPin4);
AccelStepper stepper2(AccelStepper::FULL4WIRE, motorPin5, motorPin7, motorPin6, motorPin8);
void setup() {
stepper1.setMaxSpeed(200);
stepper1.setAcceleration(50);
stepper2.setMaxSpeed(200);
stepper2.setAcceleration(50);
}
void loop() {
// Move both motors simultaneously
stepper1.moveTo(2000); // Move stepper 1 to position 2000
stepper2.moveTo(2000); // Move stepper 2 to position 2000
while (stepper1.distanceToGo() != 0 || stepper2.distanceToGo() != 0) {
stepper1.run();
stepper2.run();
}
delay(2000); // Wait for 2 seconds
stepper1.moveTo(-2000); // Move stepper 1 back to position -2000
stepper2.moveTo(-2000); // Move stepper 2 back to position -2000
while (stepper1.distanceToGo() != 0 || stepper2.distanceToGo() != 0) {
stepper1.run();
stepper2.run();
}
delay(2000); // Wait for 2 seconds
}
Important Note: This is just a basic example. You'll likely need to adjust the code to fit your specific needs. Experiment with different speeds, accelerations, and movements until you achieve the desired result.
Troubleshooting: When Things Go Wrong (and They Will)
Even with the best code, things can still go wrong. Here are some common issues and how to fix them:
- Motors are stuttering: Check your power supply and make sure it's providing enough current. Also, double-check your wiring.
- Motors are moving unevenly: Adjust the acceleration and maximum speed settings in your code. Also, make sure your motors are properly calibrated.
- Motors aren't moving at all: Check your wiring, your power supply, and make sure your code is actually running. And for the love of all that is holy, make sure the motors are actually ENABLED. (I've been there…)
The key is to be patient and methodical. Take things one step at a time, and don't be afraid to experiment. Remember that burnt plastic smell from earlier? Embrace it! It's the smell of progress (or at least, the smell of learning something new).
Final Thoughts: Go Forth and Conquer!
Controlling two stepper motors simultaneously can be tricky, but with the right hardware, software, and a healthy dose of perseverance, you can achieve some amazing results. Just remember to take breaks, avoid throwing things at your computer (tempting, I know), and celebrate your successes, no matter how small. Good luck, and happy stepping!
And if you ever manage to build a robotic arm that doesn't try to strangle you, please let me know. I'm still working on that part.